

A formula to calculate the roots or solutions of a quadratic equation ax2 + bx + c = 0 is known as the Quadratic Formula which is given as,

where a is the coefficient of x2, b is the coefficient of x and c is the constant term. We use this formula to find the required solutions (roots) of the given quadratic equation.
Some special conditions:
When b2 > 4ac, there are two distinct real roots.
When b2 = 4ac, there is a single real root.
When b2 < 4ac, there is no real roots.
********************
10 Math Problems officially announces the release of Quick Math Solver and 10 Math Problems, Apps on Google Play Store for students around the world.

********************

********************
Derivation of Quadratic Formula
Consider the general quadratic equation
ax2 + bx + c = 0, where a, b and c are constants and
a≠ 0.
Rewriting the given equation as
ax2 + bx = – c
Dividing both sides by the coefficient of x2 i.e. a we get
In order to make the left-hand side a perfect square, we take half the coefficient of x,
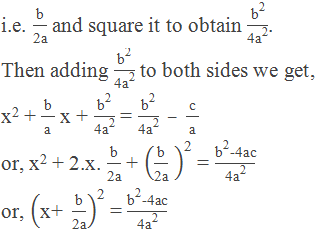
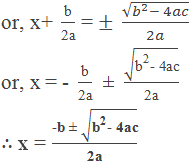
Hence the Quadratic Formula is derived.
Workout Examples
Example 1: Solve x2 – 7x + 12 = 0 by using quadratic
formula.
Solution: Here,
x2 – 7x + 12 = 0
Comparing this equation with ax2 + bx + c = 0 we get,
a = 1
b = –7
c = 12
Now, by using quadratic formula,

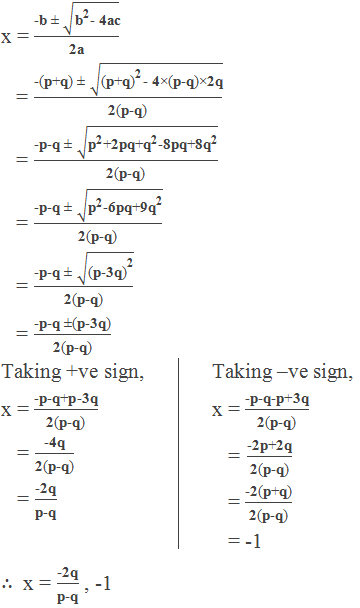
Example 2: Solve (p – q)x2 + (p + q)x + 2q = 0 by using
quadratic formula.
Solution: Here,
(p – q)x2 + (p + q)x + 2q = 0
Comparing this equation with ax2 + bx + c = 0 we get,
a = (p – q)
b = (p + q)
c = 2q
Using quadratic formula,
or, 6x2-18x+12 = 3x2-5x
or, 6x2–18x+12–3x2+5x = 0
or, 3x2–13x+12= 0
Comparing this equation with ax2 + bx + c = 0 we get,
a = 3
b = –13
c = 12
Now, by using quadratic formula,

If you have any questions or problems regarding the Quadratic Formula, you can ask here, in
the comment section below.
Was this article helpful? LIKE
and SHARE with your friends…
0 comments: